
2025
Systematic Comparison of Projection Methods for Monocular 3D Human Pose Estimation on Fisheye Images
Stephanie Käs, Sven Peter, Henrik Thillmann, Anton Burenko, David Benjamin Adrian, Dennis Mack, Timm Linder, Bastian Leibe.
ICRA 2025
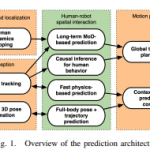
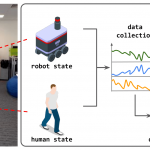
Hierarchical System to Predict Human Motion and Intentions for Efficient and Safe Human-Robot Interaction in Industrial Environments
Andrey Rudenko, Yufei Zhu, Tiago Rodrigues de Almeida, Tim Schreiter, Luca Castri, Nicola Belotto, Narunas Vaskevicius, Luigi Palmieri, Martin Magnusson and Achim J Lilienthal.
Proceedings of German Robotics Conference 2025
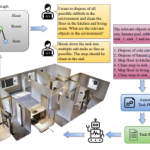
Delta: Decomposed efficient long-term robot task planning using large language models
Yuchen Liu, Luigi Palmieri, Sebastian Koch, Ilche Georgievski and Marco Aiello.
ICRA 2025
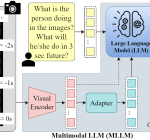
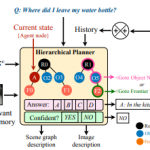
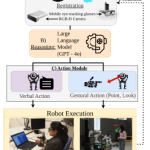
Context-Aware Human Behavior Prediction Using Multimodal Large Language Models: Challenges and Insights
Yuchen Liu, Lino Lerch, Luigi Palmieri, Andrey Rudenko, Sebastian Koch, Timo Ropinski and Marco Aiello.
ROMAN 2025
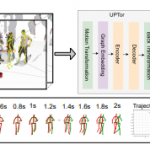
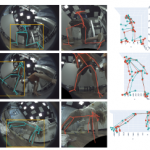
UPTor: Unified 3D Human Pose Dynamics and Trajectory Prediction for Human-Robot Interaction
Nisarga Nilavadi, Andrey Rudenko and Timm Linder.
ICRA 2025
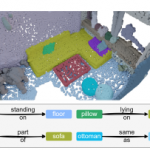
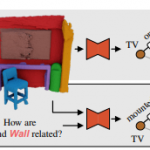
RelationField: Relate Anything in Radiance Fields
Sebastian Koch, Johanna Wald, Mirco Colosi, Narunas Vaskevicius, Pedro Hermosilla, Federico Tombari and Timo Ropinski.
Proceedings of IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2025.
Acquisition of high-quality images for camera calibration in robotics applications via speech prompts
Timm Linder, Kadir Yilmaz , David Adrian and Bastian Leibe.
Proceedings of German Robotics Conference (GRC) 2025
Evaluating Efficiency and Engagement in Scripted and LLM-Enhanced Human-Robot Interactions
Tim Schreiter, Jens V. Rüppel, Rishi Hazra, Andrey Rudenko, Martin Magnusson and Achim J. Lilienthal.
Proceedings of 2025 20th ACM/IEEE International Conference on Human-Robot Interaction (HRI)
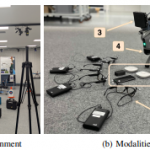
Collecting Human Motion Data in Large and Occlusion-Prone Environments using Ultra-Wideband Localization
Janik Kaden, Maximilian Hilger, Tim Schreiter, Marius Schaab, Thomas Graichen, Andrey Rudenko, Ulrich Heinkel and Achim J. Lilienthal.
Accepted for presentation at the 7th Workshop on Long-term Human Motion Prediction (LHMP) at International Conference...

Multimodal Interaction and Intention Communication for Industrial Robots
Tim Schreiter, Andrey Rudenko, Jens V Ruppel, Martin Magnusson and Achim J Lilienthal.
1st German Robotics Conference
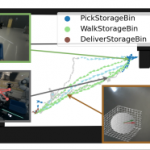
THÖR-MAGNI Act: Actions for Human Motion Modeling in Robot-Shared Industrial Spaces
Tiago Rodrigues de Almeida, Tim Schreiter, Andrey Rudenko, Luigi Palmieri, Johannes A. Stork and Achim J. Lilienthal.
20th edition of the ACM/IEEE International Conference on Human-Robot Interaction
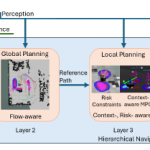
DARKO-Nav: Hierarchical Risk and Context-Aware Robot Navigation in Complex Intralogistic Environments
Elena Stracca, Andrey Rudenko, Luigi Palmieri, Paolo Salaris, Luca Castri, Niccolò Mazzi, Vasilije Rakcevic, Narunas Vaskevicius, Timm Linder, Nicola Bellotto, Tim Schreiter, Yufei Zhu, Manuel Castellano Quero, Olga Napolitano, Elisa Stefanini, Lukas ...
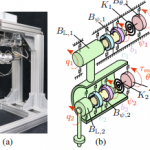
A Novel Formulation for Adaptive Computed Torque Control Enabling Low Feedback Gains in Highly Dynamical Tasks
Giorgio Simonini, Marco Baracca, Tommaso Cavaliere, Antonio Bicchi and Paolo Salaris.
IEEE Access
A Multivariate functional analysis of inter-hands spatiotemporal coordination in human bimanual tasks and its implications for robotics
Marco Baracca, Andre Meixner, Giuseppe Averta, Paolo Salaris, Tamin Asfour and Matteo Bianchi.
Proceedings of IEEE11th International Conference on Automation, Robotics, and Applications (ICARA)
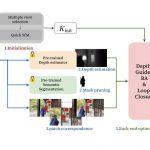
Large-scale visual SLAM for in-the-wild videos
Shuo Sun, Torsten Sattler, Malcolm Mielle, Achim J. Lilienthal, Martin Magnusson.
arXiv preprint:2504.20496
Scheduling autonomous robots for an intralogistic application: A comparison of lookahead-based ADP strategies
Margherita Battistotti, Paolo Brandimarte, Francesca Giancola and Nicoló Mazzi.
Expert Systems with Applications 271
KEA: Keeping Exploration Alive by Proactively Coordinating Exploration Strategies
Shih-Min Yang, Martin Magnusson, Johannes A. Stork and Todor Stoyanov.
Proceedings of the 2025 International Conference on Machine Learning
Fast Online Learning of CLiFF-maps in Changing Environments
Yufei Zhu, Andrey Rudenko, Luigi Palmieri, Lukas Heuer, Achim J. Lilienthal and Martin Magnusson.
Proceedings of 2025 IEEE International Conference on Robotics and Automation (ICRA)

THÖR-MAGNI: A large-scale indoor motion capture recording of human movement and robot interaction
Tim Schreiter, Tiago Rodrigues de Almeida, Yufei Zhu, Eduardo Gutierrez Maestro, Lucas Morillo-Mendez, Andrey Rudenko, Luigi Palmieri, Tomasz P Kucner, Martin Magnusson and Achim J Lilienthal.
The International Journal of Robotics Research
A technical integration framework for human-like motion generation in symmetric dual arm picking of large objects
Marco Baracca, Luca Morello, and Matteo Bianchi.
Proceedings of 2025 IEEE/SICE International Symposium on System Integration (SII)
2024
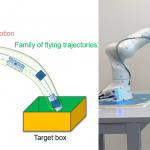
Tube Acceleration: Robust Dexterous Throwing Against Release Uncertainty
Yang Liu and Aude Billard.
IEEE Transactions on Robotics
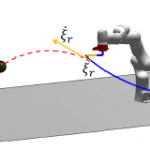
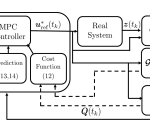
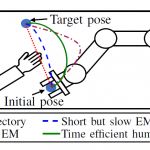
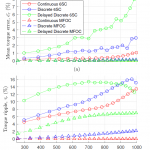
Efficient Context-Aware Model Predictive Control for Human-Aware Navigation
Elisa Stefanini, Luigi Palmieri, Andrey Rudenko, Till Hielscher, Timm Linder and Lucia Pallottino.
IEEE Robotics and Automation Letters
GraphEQA: Using 3D Semantic Scene Graphs for Real-time Embodied Question Answering
Saumya Saxena, Blake Buchanan, Chris Paxton, Bingqing Chen, Narunas Vaskevicius, Luigi Palmieri, Jonathan Francis and Oliver Kroemer.
arXiv: 2412.14480
Open3DSG: Open-Vocabulary 3D Scene Graphs from Point Clouds with Queryable Objects and Open-Set Relationships
Sebastian Koch, Narunas Vaskevicius, Mirco Colosi, Pedro Hermosilla and Timo Ropinski.
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)

Human gaze and head rotation during navigation, exploration, and object manipulation in shared environments with robots
Tim Schreiter, Andrey Rudenko, Martin Magnusson and Achim J. Lilienthal.
Proceedings of 2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN)
Bidirectional Intent Communication: A Role for Large Foundation Models
Tim Schreiter, Rishi Hazra, Jens Rüppel and Andrey Rudenko.
2024 33rd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)
Optimal Control for Clutched-Elastic Robots: A Contact-Implicit Approach
Dennis Ossadnik, Vasilije Rakčević, Mehmet C. Yildirim, Edmundo Pozo Fortunić, Hugo T. M. Kussaba, Abdalla Swikir and Sami Haddadin.
2024 IEEE International Conference on Robotics and Automation (ICRA)
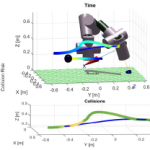
Plan it Safe: A Risk-Driven Motion Planning Framework for Collaborative Robots
Elena Stracca, Alessandro Palleschi, Lucia Pallottino and Paolo Salaris.
Proceedings of IEEE 20th International Conference on Automation Science and Engineering (CASE),
Active Sensing Control for Differentially Flat Systems
Olga Napolitano, Annamaria Pinizzotto, Matteo Verdecchia, Alessio Pettinari, Daniela Selvi, Lucia Pallottino and Paolo Salaris.
IEEE Control Systems Letters
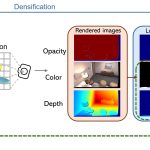
High-Fidelity SLAM Using Gaussian Splatting with Rendering-Guided Densification and Regularized Optimization
Shuo Sun, Malcolm and Mielle, Achim J. Lilienthal and Martin Magnusson.
Proceedings of 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)

3QFP: Efficient neural implicit surface reconstruction using Tri-Quadtrees and Fourier feature Positional encoding
Shuo Sun, Malcolm Mielle, Achim J. Lilienthal and Martin Magnusson.
Proceedings of 2024 IEEE International Conference on Robotics and Automation (ICRA).
Experimental Evaluation of ROS-Causal in Real-World Human-Robot Spatial Interaction Scenarios
Luca Castri, Gloria Beraldo, Sariah Mghames, Marc Hanheide and Nicola Bellotto.
Proceedings of 2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN)
neuROSym: Deployment and Evaluation of a ROS-based Neuro-Symbolic Model for Human Motion Prediction
Sariah Mghames, Luca Castri, Marc Hanheide and Nicola Bellotto.
Proceedings of the 2024 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE International Conference on Robotics, Automation and Mechatronics (RAM)
Learning Extrinsic Dexterity with Parameterized Manipulation Primitives
Shih-Min Yang, Martin Magnusson, Johannes A. Stork and Todor Stoyanov
Shih-Min Yang, Martin Magnusson, Johannes A. Stork and Todor Stoyanov
Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA)
LaCE-LHMP: Airflow Modelling-Inspired Long-Term Human Motion Prediction By Enhancing Laminar Characteristics in Human Flow
Yufei Zhu, Han Fan, Andrey Rudenko, Martin Magnusson, Erik Schaffernicht and Achim J. Lilienthal.
Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA)
Benchmarking Multi-Robot Coordination in Realistic, Unstructured Human-Shared Environments
Lukas Heuer, Luigi Palmieri, Anna Mannucci, Sven Koenig and Martin Magnusson.
Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)
A Novel Variable Stiffness Suspension System for Improved Stability and Control of Tactile Mobile Manipulators
Sebastian Kuhn, Mehmet C. Yildirim, Edmundo Pozo Fortunić, Kubra Karacan, Abdalla Swikir, and Sami Haddadin.
Proceedings of 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Throwing objects with collaborative manipulators using minimum-jerk trajectories
Georgio Simonini, Riccardo Di Majo, Lorenzo Boccalini, Matteo Guerci, Antonio Bicchi, and Paolo Salaris.
2023 I-RIM Conference
Active Sensing for Data Quality Improvement in Model Learning
Olga Napolitano, Marco Cognetti, Lucia Pallottino, Dimitrios Kanoulas, Paolo Salaris, and Valerio Modugno.
IEEE Control Systems Letters
The Cluttered Environment Picking Benchmark (CEPB) for Advanced Warehouse Automation
Salvatore D’Avella, Matteo Bianchi, Ashok M. Sundaram, Carlo Alberto Avizzano, Máximo A. Roa and Paolo Tripicchio.
IEEE Robotics & Automation Magazine
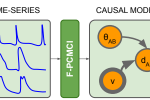
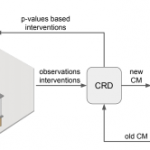
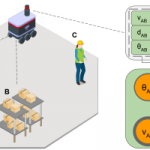
CAnDOIT: Causal Discovery with Observational and Interventional Data from Time Series
Luca Castri, Sariah Mghames, Marc Hanheide and Nicola Bellotto.
Advanced Intelligent Systems

Trajectory Prediction for Heterogeneous Agents: A Performance Analysis on Small and Imbalanced Datasets
Tiago Rodrigues de Almeida, Yufei Zhu, Andrey Rudenko, Tomasz P. Kucner, Johannes A. Stork, Martin Magnusson and Achim J. Lilienthal.
IEEE Robotics and Automation Letters
Receding Horizon Re-Ordering of Multi-Agent Execution Schedules
Alexander Berndt, Niels van Duijkeren, Luigi Palmieri, Alexander Kleiner and Tamás Keviczky.
IEEE Transactions on Robotics
Dynamic Coupling for Underactuated Compliant Arms With Not Well-Defined Relative Degree
Michele Pierallini, Franco Angelini, and Manolo Garabini.
IEEE Transactions on Systems, Man, and Cybernetics: Systems
A general approach for generating artificial human-like motions from functional components of human upper limb movements
Marco Baracca, Giuseppe Averta and Matteo Bianchi.
Control Engineering Practice 148
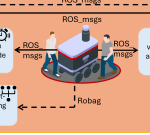
ROS-Causal A ROS-based Causal Analysis Framework for Human-Robot Interaction Applications
Luca Castri, Gloria Beraldo, Sariah Mghames, Marc Hanheide, and Nicola Bellotto.
Accepted by the "Causal-HRI: Causal Learning for Human-Robot Interaction" workshop at the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI)
Lang3DSG: Language-based contrastive pre-training for 3D scene graph prediction
Sebastian Koch, Pedro Hermosilla, Narunas Vaskevicius, Mirco Colosi, and Timo Ropinski.
Proceedings of the 2024 International Conference on 3D Vision (3DV)
2023
Optimal manipulation patterns can drive the estimation of object mechanical properties
Paolo Bonifati, Giuseppe Averta, Paolo Salaris and Matteo Bianchi.
2023 I-RIM Conference
A provably stable iterative learning controller for continuum soft robots
Michele Pierallini, Francesco Stella, Franco Angelini, Bastian Deutschmann, Josie Hughes, Antonio Bicchi, Manolo Garabini, and Cosimo Della Santina.
IEEE Robotics and Automation Letters
A Data-Efficient Approach for Long-Term Human Motion Prediction Using Maps of Dynamics
Yufei Zhu, Andrey Rudenko, Tomasz P. Kucner, Achim J. Lilienthal, and Martin Magnusson.
Proceedings of the 5th LHMP Workshop held in conjunction with 40th IEEE International Conference on Robotics and Automation (ICRA)
Towards Long-term Autonomy: A Perspective from Robot Learning
Zhi Yan, Li Sun, Tomas Krajnik, Tom Duckett, and Nicola Bellotto.
Proceedings of AAAI-23 Bridge Program on AI & Robotics

A Concise Overview of Safety Aspects in Human-Robot Interaction
Mazin Hamad, Simone Nertinger, Robin J. Kirschner, Luis Figueredo, Abdeldjallil Naceri, and Sami Haddadin.
Proceedings of Human-Friendly Robotics 2023: 16th International Workshop
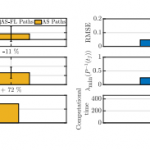
CLiFF-LHMP: Using Spatial Dynamics Patterns for Long-Term Human Motion Prediction
Yufei Zhu, Andrey Rudenko, Tomasz P. Kucner, Luigi Palmieri, Kai O. Arras, Achim J. Lilienthal, and Martin Magnusson.
Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Minimizing Energy Consumption of Elastic Robots in Repetitive Tasks
Alexandra Velasco Vivas, Antonello Cherubini, Manolo Garabini, Paolo Salaris, and Antonio Bicchi.
IEEE Transactions On Systems, Man, And Cybernetics: Systems
Survey of maps of dynamics for mobile robots
Tomasz Piotr Kucner, Martin Magnusson, Sariah Mghames, Luigi Palmieri, Francesco Verdoja, Chittaranjan Srinivas Swaminathan, Tomáš Krajník, Erik Schaffernicht, Nicola Bellotto, Marc Hanheide, and Achim J. Lilienthal.
The International Journal of Robotics Re...

Grasp it Like a Pro 2.0: A Data-Driven Approach Exploiting Basic Shapes Decomposition and Human Data for Grasping Unknown Objects
Alessandro Palleschi, Franco Angelini, Chiara Gabellieri, Do Won Park, Lucia Pallottino, Antonio Bicchi, and Manolo Garabini.
IEEE Transactions on Robotics

Optimal Control for Articulated Soft Robots
Saroj Prasad Chhatoi, Michele Pierallini, Franco Angelini, Carlos Mastalli, and Manolo Garabini.
IEEE Transactions on Robotics
Iterative Learning Control for Compliant Underactuated Arms
Michele Pierallini, Franco Angelini, Riccardo Mengacci, Alessandro Palleschi, Antonio Bicchi, and Manolo Garabini.
IEEE Transactions on Systems, Man, and Cybernetics: Systems
A multi-modal under-sensorized wearable system for optimal kinematic and muscular tracking of human upper limb motion
Paolo Bonifati, Marco Baracca, Mariangela Menolotto, Giuseppe Averta, and Matteo Bianchi.
Sensors
Proactive Model Predictive Control with Multi-Modal Human Motion Prediction in Cluttered Dynamic Environments
Tiago Rodrigues de Almeida, Andrey Rudenko, Tim Schreiter, Yufei Zhu, Eduardo Gutierrez Maestro, Lukas Heuer, Luigi Palmieri, Andrey Rudenko, Anna Mannucci, Martin Magnusson, and Kai Oliver Arras.
Proceedings of the IROS Conference

Advantages of Multimodal versus Verbal-Only Robot-to-Human Communication with an Anthropomorphic Robotic Mock Driver
Tim Schreiter, Lucas Morillo-Mendez, Ravi T. Chadalavada, Andrey Rudenko, Erik Billing, Martin Magnusson, Kai O. Arras, and Achim J. Lilienthal.
Proceedings of Ro-man Conference, 2023
Data-driven Grasping and Pre-grasp Manipulation Using Hierarchical Reinforcement Learning with Parameterized Action Primitives
Shih-Min Yang, Martin Magnusson, Johannes Andreas Stork, and Todor Stoyanov.
Proceedings of IROS 2023 Workshop on Leveraging Models for Contact-Rich Manipulation

A Task-Aware Lightweight Link Design Framework for Robots Under Dynamic Loading
Mehmet C. Yildirim, Edgar Pisano, Mazin Hamad, Valentin Le Mesle, Abdalla Swikir, and Sami Haddadin.
Proceedings of IEEE-RAS International Conference on Humanoids Robots (Humanoids)

Optimally Controlling the Timing of Energy Transfer in Elastic Joints: Experimental Validation of the Bi-Stiffness Actuation Concept
Edmundo Pozo Fortunić, Mehmet C. Yildirim, Dennis Ossadnik, Abdalla Swikir, Saeed Abdolshah, and Sami Haddadin.
IEEE Robotics and Automation Letters

A Stable Adaptive Extended Kalman Filter for Estimating Robot Manipulators Link Velocity and Acceleration
Seyed Ali Baradaran Birjandi, Harshit Khurana, Aude Billard, and Sami Haddadin.
Proceedings of 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
S∗ : On Safe and Time Efficient Robot Motion Planning
Riddhiman Laha, Wenxi Wu, Ruiai Sun, Nico Mansfeld, Luis F.C. Figueredo, and Sami Haddadin.
Proceedings of 2023 International Conference on Robotics and Automation (ICRA)

Fast yet predictable braking manoeuvers for real-time robot control
Mazin Hamad, Jesus Gutierrez-Moreno, Hugo T. M. Kussaba, Nico Mansfeld, Saeed Abdolshah, Abdalla Swikir and Sami Haddadin.
Proceedings of IFAC World Congress
Cross-coupling stiffness for natural goal-directed robot motion
Dennis Ossadnik and Sami Haddadin.
Proceedings of IFAC world congress

Learning optimal controllers: A dynamical motion primitive approach
Hugo T.M. Kussaba, Abdalla Swikir, Fan Wu, Anastasija Demerdjieva, Gitta Kutyniok, and Sami Haddadin.
IFAC-PapersOnLine
SGRec3D: Self-Supervised 3D Scene Graph Learning via Object-Level Scene Reconstruction
Sebastian Koch, Pedro Hermosilla, Narunas Vaskevicius, Mirco Colosi, and Timo Ropinski.
Yash Goel, Narunas VSebastian Koch, Pedro Hermosilla, Narunas Vaskevicius, Mirco Colosi, and Timo Ropinski.
Proceedings of IEEE Winter Conference on Applications of...
Semantically Informed MPC for Context-Aware Robot Exploration
Yash Goel, Narunas Vaskevicius, Luigi Palmieri, Nived Chebrolu, Kai Oliver Arras, and Cyrill Stachniss.
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
THÖR-Magni: Comparative Analysis of Deep Learning Models for Role-Conditioned Human Motion Prediction
Tiago Rodrigues de Almeida, Andrey Rudenko, Tim Schreiter, Yufei Zhu, Eduardo Gutierrez Maestro, Lucas Morillo-Mendez, Tomasz P Kucner, Oscar Martinez Mozos, Martin Magnusson, Luigi Palmieri, Kai O Arras, and Achim J Lilienthal.
Proceedings of the IEEE/CVF...

Evaluation of Computer Vision-Based Person Detection on Low-Cost Embedded Systems
Francesco Pasti and Nicola Bellotto.
Proceedings of the 18th International Conference on Computer Vision Theory and Applications (VISAPP)
Efficient Causal Discovery for Robotics Applications
Luca Castri, Sariah Mghames, and Nicola Bellotto.
Proceedings of the Italian Conference on Robotics and Intelligent Machines (I-RIM 3D)
From continual learning to causal discovery in robotics
Luca Castri, Sariah Mghames, and Nicola Bellotto.
Proceedings of AAAI Bridge Program on Continual Causality
Enhancing Causal Discovery from Robot Sensor Data in Dynamic Scenarios
Luca Castri, Sariah Mghames, Marc Hanheide, and Nicola Bellotto.
Proceedings of the Conference on Causal Learning and Reasoning (CLeaR)
Qualitative Prediction of Multi-Agent Spatial Interactions
Sariah Mghames, Luca Castri, Marc Hanheide, and Nicola Bellotto.
Proceedings of the IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)
A Neuro-Symbolic Approach for Enhanced Human Motion Prediction
Sariah Mghames, Luca Castri, Marc Hanheide, and Nicola Bellotto.
Proceedings of the International Joint Conference on Neural Networks (IJCNN)
Human-Flow-Aware Long-Term Mobile Robot Task Planning Based on Hierarchical Reinforcement Learning
Yuchen Liu, Luigi Palmieri, Ilche Georgievski, and Marco AielIo.
IEEE Robotics and Automation Letters
A Benchmark for Multi-Robot Planning in Realistic, Complex and Cluttered Environments
Simon Schaefer, Luigi Palmieri, Lukas Heuer, Rüdiger Dillmann, Sven Koenig, and Alexander Kleiner.
Proceedings of IEEE International Conference on Robotics and Automation
2022
Insights on Oscillations and Impulses in Variable Impedance Control
Giorgio Simonini, Rachele Nebbia Colomba, Chiara Sammarco, Franco Angelini, Antonio Bicchi, and Mathew Jose Pollayil.
Proceedings of the I-RIM Conference 2022
Optimal electromyographic sensing for whole-body muscular activity estimation
Marco Baracca, Guiseppe Averta, and Matteo Bianchi.
Proceedings of the I-RIM Conference 2022
Risk space modelling for human-robot collaboration in a shared intralogistics scenario
Elena Stracca, Giorgio Grioli, Lucia Pallottino, and Paolo Salaris.
Proceedings of the I-RIM Conference 2022
Considerations on possible approaches to measure risk for obstacle avoidance
Lorenzo Paiola, Giorgio Grioli, and Antonio Bicchi.
Proceedings of the I-RIM Conference 2022
An Information-aware Lyapunov-based MPC for autonomous robots
Olga Napolitano, Lucia Pallottino, Paolo Salaris, and Daniele Fontanelli.
Proceedings of the I-RIM Conference 2022
Alignability maps for ensuring high-precision localization
Manuel Castellano-Quero, Tomasz Piotr Kucner, and Martin Magnusson. 13th IROS Workshop on Planning, Perception, Navigation for Intelligent Vehicles
Efficient 2D LIDAR-Based Map Updating For Long-Term Operations in Dynamic Environments
Elisa Stefanini, Enrico Ciancolini, Alessandro Settimi, and Lucia Pallottino.
Proceedings of 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Estimation of whole-body muscular activation from an optimal set of scarce electromyographic recordings
Marco Baracca, Guiseppe Averta, and Matteo Bianchi.
Proceedings of International Workshop on Human-Friendly Robotics

Optimal reconstruction of human motion from scarce multi-modal data
Giuseppe Averta, Matilde Iuculano, Paolo Salaris, and Matteo Bianchi.
IEEE Transactions on Human-Machine Systems
Functional Mode Switching for Safe and Efficient Human-Robot Interaction
Petr Svarny, Mazin Hamad, Alexander Kurdas, Matej Hoffmann, Saeed Abdolshah, and Sami Haddadin.
Proceedings of 2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids)
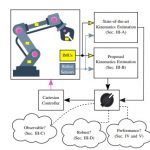
Robust Cartesian Kinematics Estimation for Task-Space Control Systems
Seyed Ali Baradaran Birjandi, Niels Dehio, Abderrahmane Kheddar, and Sami Haddadin.
Proceedings of 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
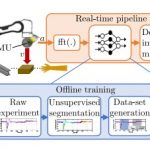
Real-time IMU-Based Learning: a Classification of Contact Materials
Edmundo Fortunić, Abdalla Swikir, Saeed Abdolsah, and Sami Haddadin.
Proceedings of 2022 IEEE/RSJ International Conference
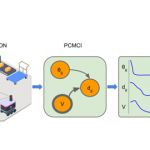
Causal discovery of dynamic models for predicting human spatial interactions
Luca Castri, Sariah Mghames, Marc Hanheide, and Nicola Bellotto.
Proceedings of International Conference on Social Robotics
The Effect of Anthropomorphism on Trust in an Industrial Human-Robot Interaction
Tim Schreiter, Lucas Morillo-Mendez, Ravi Teja Chadalavada, Andrey Rudenko, Erik Alexander Billing and Achim J. Lilienthal.
RO-MAN Workshop on "Trust, Acceptance and Social Cues in Human-Robot Interaction" (SCRITA)

The Magni Human Motion Dataset: Accurate, Complex, Multi-Modal, Natural, Semantically-Rich and Contextualized
Tim Schreiter, Tiago Rodrigues de Almeida, Yufei Zhu, Eduardo Gutierrez Maestro, Lucas Morillo-Mendez, Andrey Rudenko, Tomasz P. Kucner, Oscar Martinez Mozos, Martin Magnusson, Luigi Palmieri, Kai O. Arras, and Achim J. Lilienthal.
RO-MAN Workshop ``Towards...
Towards Self-Supervised Pre-Training of 3DETR for Label-Efficient 3D Object Detection
Rishabh Jain, Narunas Vaskevicius, and Thomas Brox.
Workshop onTransformers for Vision at IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
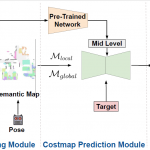
Predicting Dense and Context-aware Cost Maps for Semantic Robot Navigation
Yash Goel, Narunas Vaskevicius, Luigi Palmieri, Chebrolu Nived, and Stachniss Cyrill.
Workshop on Perception and Navigation for Autonomous Robotics in Unstructured and
Dynamic Environments at IEEE International Conference on Intelligent Robots and Systems...
A Solution to Adaptive Mobile Manipulator Throwing
Yang Liu, Aradhana Nayak, and Aude Billard.
Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS)
Benchmarking the utility of Maps of Dynamics for Human-aware Motion Planning
Chittaranjan Swaminathan, Tomasz Piotr Kucner, Anna Mannucci, Martin Magnusson, Luigi Palmieri, Sergi Molina, Federico Pecora, and Achim J. Lilienthal.
Frontiers in Robotics and AI
Global Safety Characteristics of Wheeled Mobile Robots
Mansfeld, Nico and Gómez Peña, Guillermo and Hamad, Mazin and Kurdas, Alexander A. and Abdolshah, Saeed and Sami Haddadin.
IEEE 18th International Conference on Automation Science and Engineering (IEEE CASE2022)
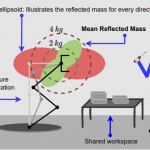
Mean Reflected Mass: A Physically Interpretable Metric for Safety Assessment and Posture Optimization in Human-Robot Interaction
Thomas Steinecker, and Alexander Kurdas, and Nico Mansfeld, and Mazin Hamad, and Robin Jeanne Kirschner, and Saeed Abdolshah and Sami Haddadin.
Proceedings IEEE International Conference on Robotics and Automation (ICRA)
An MPC Framework For Planning Safe & Trustworthy Robot Motions
Moritz Eckhoff, and Robin Jeanne Kirschner, and Elena Kern, and Saeed Abdolshah and Sami Haddadin.
IEEE International Conference on Robotics and Automation (ICRA)
Comparing Digital Implementations of Torque Control for BLDC Motors with Trapezoidal Back-Emf
Pozo Fortunić, Edmundo and Swikir, Abdalla and Abdolsah, Saeed and Sami Haddadin.
The 2022 American Control Conference (ACC)
BSA - Bi-Stiffness Actuation for optimally exploiting intrinsic compliance and inertial coupling effects in elastic joint robots
Dennis Ossadnik, Mehmet C. Yildirim, Fan Wu, Abdalla Swikir, Hugo T. M. Kussaba, Saeed Abdolshah and Sami Haddadin.
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022)
The Atlas Benchmark: an Automated Evaluation Framework for HumanMotion Prediction
Andrey Rudenko, Luigi Palmieri, Wanting Huang, Achim J Lilienthal, and Kai O. Arras.
Proc. of the IEEE Int. Symp. on Robot and Human Interactive Comm. (RO-MAN)

Voting and Attention-based Pose Relation Learning for Object Pose Estimation from 3D Point Clouds
Dinh-Cuong Hoang, Johannes A. Stork, and Todor Stoyanov.
IEEE Robotics and Automation Letters
From Human Perception and Action Recognition to Causal Understanding of Human-Robot Interaction in Industrial Environments
Stefano Ghidoni, Matteo Terreran, Daniele Evangelista, Emanuele Menegatti, Christian Eitzinger, Enrico Villagrossi, Nicola Pedrocchi, Nicola Castaman, Marcin Malecha, Sariah Mghames, Luca Castri, Marc Hanheide and Nicola Bellotto.
Ital-IA 2022
Learning with few examples the semantic description of novel human-inspired grasp strategies from RGB data
Lorenzo Collodi, Davide Bacciu, Matteo Bianchi, Giuseppe Averta.
IEEE Robotics and Automation Letters
Context-Aware Grasp Generation in Cluttered Scenes
Dinh-Cuong Hoang, Johannes A. Stork, and Todor Stoyanov.
IEEE Robotics and Automation Letters
CorAl: Introspection for robust radar and lidar perception in diverse environments using differential entropy
Daniel Adolfsson, Manuel Castellano-Quero, Martin Magnusson, Achim J. Lilienthal, and Henrik Andreasson.
Robotics and Autonomous Systems (vol. 155)
High-Level Planning for Object Manipulation with Multi Heterogeneous Robots in Shared Environments
Allessandro Palleschi, George Jose Pollayil, Mathew Jose Pollayil, Manolo Garabini, and Lucia Pallottino.
IEEE Robotics and Automation Letters
Expectable Motion Unit: Avoiding Hazards From Human Involuntary Motions in Human-Robot Interaction
Robin Jeanne Kirschner, Henning Mayer, Lisa Burr, Nico Mansfeld, Saeed Abdolshah, Sami Haddadin.
IEEE Robotics and Automation Letters
Information-aware Lyapunov-based MPC in a feedback-feedforward control strategy for autonomous robots
Olga Napolitano, Daniele Fontanelli, Lucia Pallottino, and Paolo Salaris.
IEEE Robotics and Automation Letters
2021

Coordinated motion generation and object placement: a reactive planning and landing approach
Riddhiman Laha, Jonathan Vorndamme, Luis F.C. Figueredo, Zheng Qu, Abdalla Swikir, Christoph Jähne, and Sami Haddadin.
Proceedings of 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
ULT-model: Towards a one-legged unified locomotion template model for forward hopping with an upright trunk
Dennis Ossadnik, Elisabeth Jensen, and Sami Haddadin.
Proceedings 2021 IEEE International Conference on Robotics and Automation (ICRA)
Nonlinear stiffness allows passive dynamic hopping for one-legged robots with an upright trunk
Dennis Ossadnik, Elisabeth Jensen, and Sami Haddadin.
Proceedings 2021 IEEE International Conference on Robotics and Automation (ICRA)
Speed Gain in Elastic Joint Robots: An Energy Conversion-Based Approach
Nico Mansfeld, Manuel Keppler and Sami Haddadin.
IEEE Robotics and Automation Letters
Atlas: a Benchmarking Tool for Human Motion Prediction Algorithms
Andrey Rudenko, Wanting Huang, Luigi Palmieri, and Kai O. Arras.
Proceedings RSS 2021
Benchmarking Sampling-based Motion Planning Pipelines for Wheeled Mobile Robots
Eric Heiden, Luigi Palmieri, Leonard Bruns, Kai O. Arras, Gaurav S. Sukhatme, and Sven Koenig.
ICAPS 2021

Cross-Modal Analysis of Human Detection for Robotics: An Industrial Case Study
Narunas Vaskevicius, Robert Schirmer and Kai O. Arras.
Proceedings IROS 2021
Learning to prevent grasp failure with soft hands: from on-line prediction to dual-arm grasp recovery
Giuseppe Averta, Federica Barontini, Irene Valdambrini, Paolo Cheli, Davide Bacciu, Matteo Bianchi.
Advanced Intelligent Systems