
Andrey Rudenko, Wanting Huang, Luigi Palmieri, and Kai O. Arras
Atlas: a Benchmarking Tool for Human Motion Prediction Algorithms
Proceedings RSS 2021
Abstract
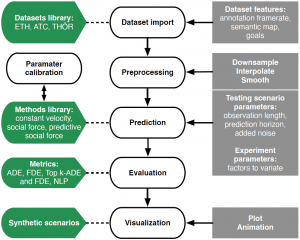
Human motion trajectory prediction, an essential task for autonomous systems in many domains, has been on the rise in the recent years. With a multitude of new methods proposed by different communities, the lack of standardized benchmarking and objective comparison between them has been a major limitation for assessing the capabilities of the state-of the-art systems. In this paper we present the Atlas benchmark which encompasses a large variety of heterogeneous datasets, representing usual human motion behaviors in different places and cultures. The Atlas benchmark offers tools, such as metrics, data preparation and filtering, calibration and visualization to overcome several limitations of existing benchmarking, thus sustaining the enduring development of better algorithms.
@InProceedings{RudenkoRSS2021workshop,
author = {Rudenko, Andrey and Huang, Wanting and Palmieri, Luigi and Arras, Kai Oliver and Lilienthal, Achim},
title = {Atlas: a Benchmarking Tool for Human Motion Prediction Algorithms},
journal = {Robotics: Science and Systems (RSS) Workshop on Social Robot Navigation},
year = {2021}
}