
Simon Schaefer, Luigi Palmieri, Lukas Heuer, Rüdiger Dillmann, Sven Koenig,
and Alexander Kleiner
Proceedings of IEEE International Conference on Robotics and Automation
Abstract
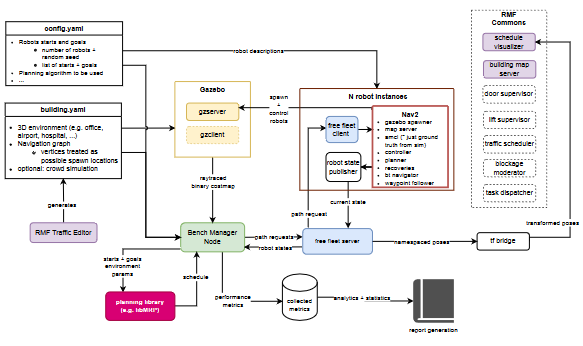
Several successful approaches exist for solving the complex problem of multi-robot planning and coordination. Due to the lack of adequate benchmarking tools, comparing these approaches and judging their suitability for use in realistic scenarios is currently difficult. Therefore, we propose an open-source benchmark suite that aims to close this gap. Unlike existing benchmarks, our approach uses full-stack multi-robot navigation systems in realistic 3D simulated environments from the intralogistic and household domains. Using the open-source frameworks ROS 2, Gazebo and RMF allows the user to add other robot platforms easily. The framework provides easy-to-use abstractions, typical metrics and interfaces to several established planning libraries for multi-robot systems. With all these features, our framework successfully aids practitioners and researchers in comparing multi-robot planning and coordination systems to the state of the art. Our experiments show how the proposed benchmark simplifies gaining insights on relevant close to real-life robotics use cases.
@InProceedings{SchaeferICRA2023,
title = { A Benchmark for Multi-Robot Planning in Realistic, Complex and Cluttered Environments },
author = {Schaefer, Simon and Palmieri, Luigi and Heuer, Lukas and Dillmann, Rüdiger and Koenig, Sven and Kleiner, Alexander},
booktitle=IEEE International Conference on Robotics and Automation,
year={2023},
}