
Alexandra Velasco Vivas, Antonello Cherubini, Manolo Garabini, Paolo Salaris, and Antonio Bicchi
IEEE Transactions On Systems, Man, And Cybernetics: Systems
Abstract
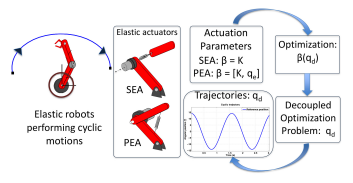
Energy consumption is an important issue in robotics. This article deals with the problem of reducing the energy consumption of compliant electro-mechanical systems while performing periodic tasks. After deriving performance indices to quantify the energy consumption of a mechanical system, we propose a method to determine both the optimal compliant actuation parameters, and link trajectories to mini-mize energy consumption. We show how this problem can be cast in a simpler one where the optimization regards only parameters that define the shape of periodic trajectories to be subsequently determined by using numerical optimization tools. Indeed, in our framework, the optimal stiffness and spring preload can be ana-lytically obtained as a function of the desired link trajectories. We then provide simulations and experimental validations of the obtained results on a two-link compliant manipulator platform which performs a repetitive pick-and-place task. Our experiments show that the use of compliant actuators instead of rigid ones and the optimization of their compliant parameters give rise to an energy saving up to 62% with respect to rigid actuation. Moreover, the simultaneous optimization of the compliant param-eters and link trajectories provide an additional energy saving up to 20%.
@ARTICLE{10097617,
author={Vivas, Alexandra Velasco and Cherubini, Antonello and Garabini, Manolo and Salaris, Paolo and Bicchi, Antonio},
journal={IEEE Transactions on Systems, Man, and Cybernetics: Systems},
title={Minimizing Energy Consumption of Elastic Robots in Repetitive Tasks},
year={2023},
volume={53},
number={8},
pages={5006-5018},
keywords={Trajectory;Optimization;Energy consumption;Actuators;Robots;Mechanical systems;Task analysis;Compliant actuation;elastic robots;energy saving;parallel elastic actuators (PEAs);series elastic actuators (SEAs);stiffness optimization;trajectory optimization},
doi={10.1109/TSMC.2023.3260644}}