
Lorenzo Paiola, Giorgio Grioli, and Antonio Bicchi
Considerations on possible approaches to measure risk for obstacle avoidance
Proceedings of the I-RIM Conference 2022
Abstract
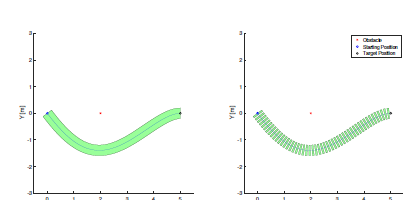
Risk minimization has historically been tackled with chance constraints or with risk-aware measure acting on stochastic cost functions. To characterize risk in an obstacle avoidance setting, the computation of the probability of collision is of paramount importance. This paper explores and compares two approaches to compute such probabilities for a robot and an obstacle under Gaussian uncertainty along a continuous path. We first establish a theoretical framework, show numerical simulations, and finally we highlight the advantages and shortcomings of the considered approaches.
@inproceedings{grioli2022considerations,
title=Considerations on possible approaches to measure risk for obstacle avoidance,
author=Lorenzo Paiola, Giorgio Grioli and Antonio Bicchi,
booktitle=2022 I-RIM Conference,
DOI=10.5281/zenodo.7531256,
pages={67--71},
year = 2022,
organization=I-RIM
}