
Timm Linder, Narunas Vaskevicius, Robert Schirmer and Kai O. Arras
Cross-Modal Analysis of Human Detection for Robotics: An Industrial Case Study
Proceedings IROS 2021
Abstract
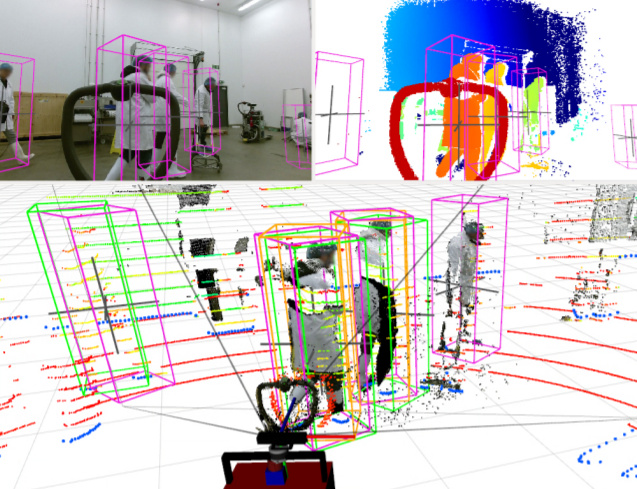
Advances in sensing and learning algorithms have led to increasingly mature solutions for human detection by robots, particularly in selected use-cases such as pedestrian detection for self-driving cars or close-range person detection in consumer settings. Despite this progress, the simple question “which sensor-algorithm combination is best suited for a person detection task at hand?” remains hard to answer. In this paper, we tackle this issue by conducting a systematic cross-modal analysis of sensor-algorithm combinations typically used in robotics. We compare the performance of state-of-the-art person detectors for 2D range data, 3D lidar, and RGB-D data as well as selected combinations thereof in a challenging industrial use-case.
We further address the related problems of data scarcity in the industrial target domain, and that recent research on human detection in 3D point clouds has mostly focused on autonomous driving scenarios. To leverage these methodological advances for robotics applications, we utilize a simple, yet effective multi-sensor transfer learning strategy by extending a strong image-based RGB-D detector to provide cross-modal supervision for lidar detectors in the form of weak 3D bounding box labels.
Our results show a large variance among the different approaches in terms of detection performance, generalization, frame rates and computational requirements. As our use-case contains difficulties representative for a wide range of service robot applications, we believe that these results point to relevant open challenges for further research and provide valuable support to practitioners for the design of their robot system.
@InProceedings{LinderIROS2021,
author = {Linder, Timm and Vaskevicius, Narunas and Schirmer, Robert and Arras, Kai Oliver},
title = {Cross-Modal Analysis of Human Detection for Robotics: An Industrial Case Study},
journal = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2021}
}