
Pozo Fortunić, Edmundo and Swikir, Abdalla and Abdolsah, Saeed and Sami Haddadin
The 2022 American Control Conference (ACC)
Abstract
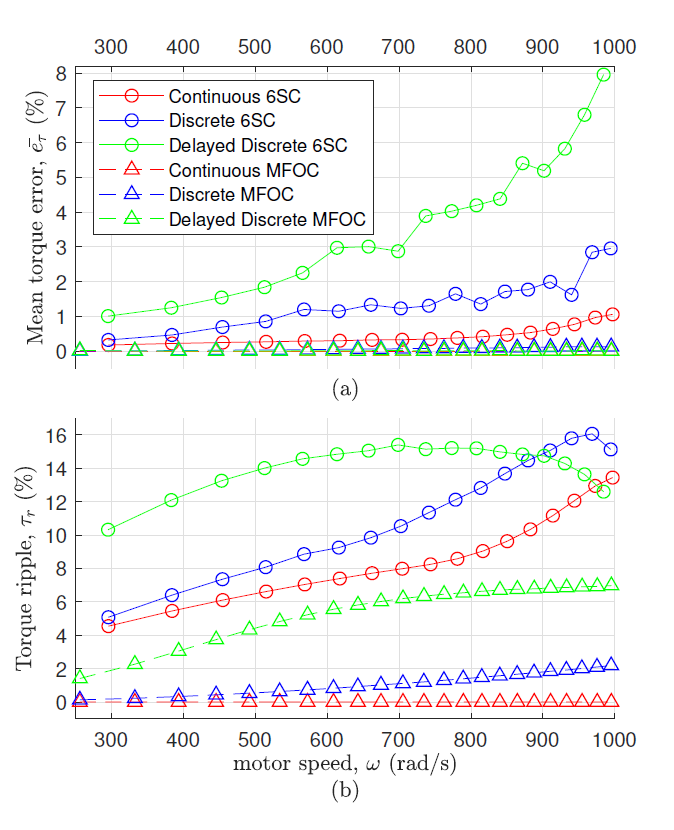
This paper gives a systematic comparison between the digital implementations of two current state-of-the-art control techniques for Brushless DC Motors (BLDC) with trapezoidal back-emf, namely Six-Step-Commutation (6SC) and Modified Field Oriented Control (MFOC). Ideally, both techniques are able to produce ripple-free torque. However, due to several real-world factors, including discrete implementation and requirements on fundamental-to-sampling frequency ratio, this is not possible in reality. Based on continuous PI-controllers and their discrete approximations, including a delayed version, we compare the performance of 6SC and MFOC based on the torque ripple and the mean torque error. Conclusively, with the use of the continuous PI controllers and MFOC it is indeed possible to generate smooth torque also over high dynamic ranges, which so far was only clear for low speeds. Still, for the discrete PI control case, ripple-free torque is not achievable, though it is apparent that the generated ripple is significantly lower than those of 6SC with continuous or discrete implementation. For torque tracking, the error increases disproportionally for 6SC compared to MFOC.
@inproceedings{Pozo2022,
title = {Comparing Digital Implementations of Torque Control for BLDC Motors with Trapezoidal Back-Emf},
author = {Pozo Fortunić, Edmundo and Swikir, Abdalla and Abdolsah, Saeed and Haddadin, Sami},
booktitle={The 2022 American Control Conference (ACC)},
year={2022}
}