
Luca Castri, Sariah Mghames, Marc Hanheide, and Nicola Bellotto
Proceedings of International Conference on Social Robotics
Abstract
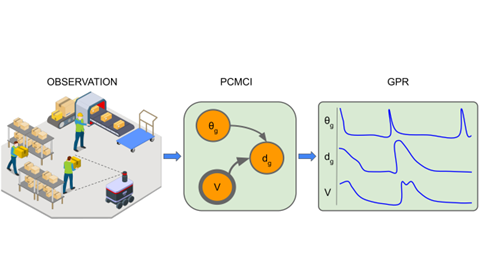
Exploiting robots for activities in human-shared environments, whether warehouses, shopping centres or hospitals, calls for such robots to understand the underlying physical interactions between nearby agents and objects. In particular, modelling cause-and-effect relations between the latter can help to predict unobserved human behaviours and anticipate the outcome of specific robot interventions. In this paper, we propose an application of causal discovery methods to model human-robot spatial interactions, trying to understand human behaviours from real-world sensor data in two possible scenarios: humans interacting with the environment, and humans interacting with obstacles. New methods and practical solutions are discussed to exploit, for the first time, a state-of-the-art causal discovery algorithm in some challenging human environments, with potential application in many service robotics scenarios. To demonstrate the utility of the causal models obtained from real-world datasets, we present a comparison between causal and non-causal prediction approaches. Our results show that the causal model correctly captures the underlying interactions of the considered scenarios and improves its prediction accuracy.
@inproceedings{castri2022causal,
title={Causal discovery of dynamic models for predicting human spatial interactions},
author={Castri, Luca and Mghames, Sariah and Hanheide, Marc and Bellotto, Nicola},
booktitle={International Conference on Social Robotics},
pages={154--164},
year={2022},
organization={Springer}