
Dennis Ossadnik and Sami Haddadin
Proceedings of IFAC world congress
Abstract
The capability of humans to use their natural dynamics for generating explosive
motions in a highly-coordinated sequence is a feature that has yet to be reached in robotics.
With the introduction of intrinsically elastic joints, great progress towards this goal has been made.
However, there are still some challenges associated with this type of actuation, which limits its
application. Generating goal-directed sequences has proven to be difficult since optimal control
solutions tend to result in uncoordinated swing-up motions. This can be explained when viewing
the structure of the stiffness matrix: If the elastic elements are placed in series with the motor, a
diagonal stiffness matrix is generated. This in turn leads to a multitude of frequencies in which
the system can oscillate. By adding off-diagonal elements, a dominant main resonance behavior
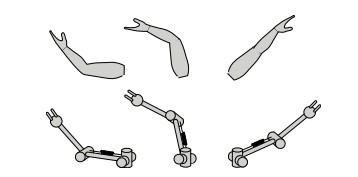
can be achieved. Leveraging this cross-coupling stiffness, we show that robots are capable to
produce natural goal-directed oscillatory motions as well as explosive movements that closely
resemble human throwing.
@inproceedings{Ossadnik2023_CrossCoupling,
title={Cross-coupling stiffness for natural goal-directed robot motion},
author={Ossadnik, Dennis and Haddadin, Sami},
booktitle={IFAC world congress. Accepted.},
year={2023}
}