
Olga Napolitano, Lucia Pallottino, Paolo Salaris, and Daniele Fontanelli
From Human Perception and Action Recognition to Causal Understanding of Human-Robot Interaction in Industrial Environments
Proceedings of the I-RIM Conference 2022
Abstract
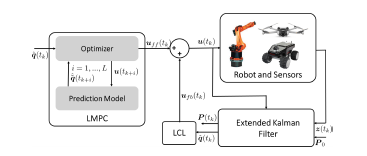
This paper proposes a feedback-feedforward con-trol scheme that combines the benefits of an online active sensing control strategy to maximize the information needed for correctly executing the desired task (the feedforward compo-nent), with a Lyapunov-based control strategy that guarantees an asymptotic convergence towards the task itself (the feedback component). To show the effectiveness of our method, we consider a unicycle equipped with onboard sensors that has to perform the classical path following task.
@inproceedings{napolitano2022informationaware,
title=An Information-aware Lyapunov-based MPC for autonomous robots,
author=Olga Napolitano, Daniele Fontanelli, Lucia Pallottino and Paolo Salaris,
booktitle=2022 I-RIM Conference,
DOI=10.5281/zenodo.7531254,
pages={65--67},
year = 2022,
organization=I-RIM
}