
Elisa Stefanini, Luigi Palmieri, Andrey Rudenko, Till Hielscher, Timm Linder and Lucia Pallottino
IEEE Robotics and Automation Letters
Abstract
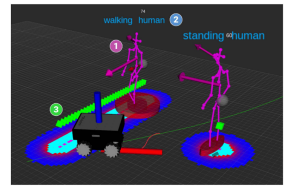
With the goal of creating efficient human-aware robot navigation systems, we present a Context-aware Model Predictive Control (MPC) formulation designed specifically for dynamic and crowded environments. State-of-the-art approaches use mainly geometric information and predictions of human motion, thus being proactive about human positions and intents but less aware of high-level behaviors encoded in contextual cues of human activities. In contrast to that, we propose a holistic planning solution that considers additional contextual information such as 3D human body poses with their velocities and recognized activities. We carefully design the MPC formulation to facilitate the integration of modern perception systems and the usage of fast solvers for embedded robot motion optimization. Compared to a set of baselines, our proposed system not only ensures safety but also significantly improves task and computational efficiency. Through extensive simulations and real-life experiments, our planner demonstrates reliable operation in terms of smooth and efficient navigation in human-populated areas
@ARTICLE{10680398,
author={Stefanini, Elisa and Palmieri, Luigi and Rudenko, Andrey and Hielscher, Till and Linder, Timm and Pallottino, Lucia},
journal={IEEE Robotics and Automation Letters},
title={Efficient Context-Aware Model Predictive Control for Human-Aware Navigation},
year={2024},
volume={9},
number={11},
pages={9494-9501},
keywords={Three-dimensional displays;Navigation;Collision avoidance;Robot kinematics;Safety;Human activity recognition;Motion planning;Path planning;Autonomous agents;Human-aware motion planning;motion and path planning;autonomous agents},
doi={10.1109/LRA.2024.3461552}}