
Mansfeld, Nico and Gómez Peña, Guillermo and Hamad, Mazin and Kurdas, Alexander A. and Abdolshah, Saeed and Sami Haddadin
IEEE 18th International Conference on Automation Science and Engineering (IEEE CASE2022)
Abstract
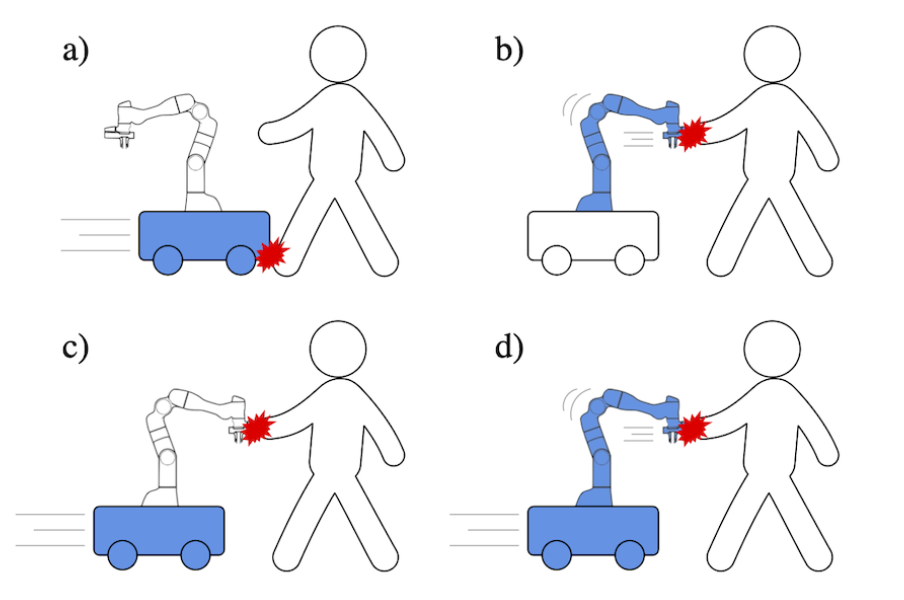
Mobile manipulators have become increasingly popular in industry because they can be used for a large variety of tasks in a versatile and flexible manner. The perception and planning/control schemes of mobile robots enable them to share a workspace with humans. However, as undesired or unforeseen contacts can generally not be avoided, it is essential to understand the intrinsic safety properties of such systems. Then, collision safety can be systematically accounted for in mechanism design, planning, and control. In this paper, we derive the safety characteristics of wheeled mobile manipulators, more specifically the achievable reflected mass and velocity range, and show how they can be related to human injury data in the previously introduced Safety Map for a model-independent and interpretation-free safety assessment. We investigate two common types of wheeled mobile platforms and the combination of these with the seven-DOF Franka Emika robot. We analyze the influence of the vehicle parameters on the safety performance and derive the Safety Map representations for four practically relevant industrial collision scenarios.
@article{mansfeld2022global,
title={Global Safety Characteristics of Wheeled Mobile Robots},
author={Mansfeld, Nico and G\'omez Pe\~na, Guillermo and Hamad, Mazin and Kurdas, Alexander A. and Abdolshah, Saeed and Haddadin, Sami},
booktitle={IEEE 18th International Conference on Automation Science and Engineering (IEEE CASE2022)},
year={2022}
organization={IEEE}
}