
Stephanie Käs, Sven Peter, Henrik Thillmann, Anton Burenko, David Benjamin Adrian, Dennis Mack, Timm Linder, Bastian Leibe
ICRA 2025
Abstract
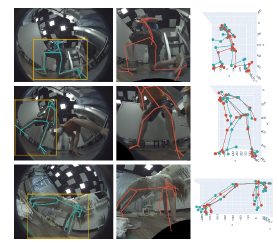
Fisheye cameras offer robots the ability to capture human movements across a wider field of view (FOV) than standard pinhole cameras, making them particularly useful for applications in human-robot interaction and automotive contexts. However, accurately detecting human poses in fisheye images is challenging due to the curved distortions inherent to fisheye optics. While various methods for undistorting fisheye images have been proposed, their effectiveness and limitations for poses that cover a wide FOV has not been systematically evaluated in the context of absolute human pose estimation from monocular fisheye images. To address this gap, we evaluate the impact of pinhole, equidistant and double sphere camera models, as well as cylindrical projection methods, on 3D human pose estimation accuracy. We find that in close-up scenarios, pinhole projection is inadequate, and the optimal projection method varies with the FOV covered by the human pose. The usage of advanced fisheye models like the double sphere model significantly enhances 3D human pose estimation accuracy. We propose a heuristic for selecting the appropriate projection model based on the detection bounding box to enhance prediction quality.
@inproceedings{Kaes2025FisheyeMeTRAbs,
title = {Systematic Comparison of Projection Methods for Monocular 3{D} Human Pose Estimation on Fisheye Images},
author = {Stephanie Käs and Sven Peter and Henrik Thillmann and Anton Burenko and David Benjamin Adrian and Dennis Mack and Timm Linder and Bastian Leibe},
booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
year = {2025},
}