
Elena Stracca, Andrey Rudenko, Luigi Palmieri, Paolo Salaris, Luca Castri, Niccolò Mazzi, Vasilije Rakcevic, Narunas Vaskevicius, Timm Linder, Nicola Bellotto, Tim Schreiter, Yufei Zhu, Manuel Castellano Quero, Olga Napolitano, Elisa Stefanini, Lukas Heuer, Martin Magnusson, Abdalla Swikir and Achim J Lilienthal
European Robotics Forum
Abstract
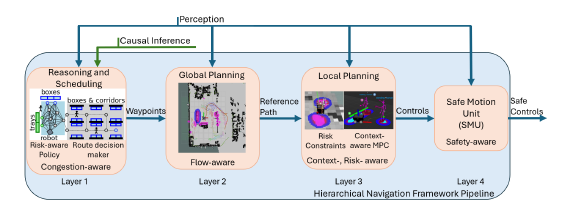
We propose a flexible hierarchical navigation stack for a mobile robot in complex dynamic environments. Our solution includes several layers to efficiently decompose the complex problem into task planning, navigation, control and safe velocity components. In contrast to the prior art, our system at every level incorporates diverse contextual information about the environment, anticipates navigation risks and proactively avoids collisions with dynamic agents.
@InProceedings{10.1007/978-3-031-89471-8_24,
author="Stracca, Elena
and Rudenko, Andrey
and Palmieri, Luigi
and Salaris, Paolo
and Castri, Luca
and Mazzi, Nicol{\`o}
and Rakcevic, Vasilije
and Vaskevicius, Narunas
and Linder, Timm
and Bellotto, Nicola
and Schreiter, Tim
and Zhu, Yufei
and Castellano Quero, Manuel
and Napolitano, Olga
and Stefanini, Elisa
and Heuer, Lukas
and Magnusson, Martin
and Swikir, Abdalla
and J. Lilienthal, Achim",
editor="Huber, Marco
and Verl, Alexander
and Kraus, Werner",
title="DARKO-Nav: Hierarchical Risk and Context-Aware Robot Navigation in Complex Intralogistic Environments",
booktitle="European Robotics Forum 2025",
year="2025",
publisher="Springer Nature Switzerland",
address="Cham",
pages="155--161",
abstract="We propose a flexible hierarchical navigation stack for a mobile robot in complex dynamic environments. Addressing the growing need for reliable navigation in real-world scenarios, where dynamic agents and environmental uncertainties pose significant challenges, our solution decomposes this complexity into task planning, navigation, control, and safe velocity components. In contrast to the prior art, our system at every level incorporates diverse contextual information about the environment, anticipates navigation risks and proactively avoids collisions with dynamic agents.",
isbn="978-3-031-89471-8"
}