
Marco Baracca, Luca Morello, and Matteo Bianchi
Proceedings of 2025 IEEE/SICE International Symposium on System Integration (SII)
Abstract
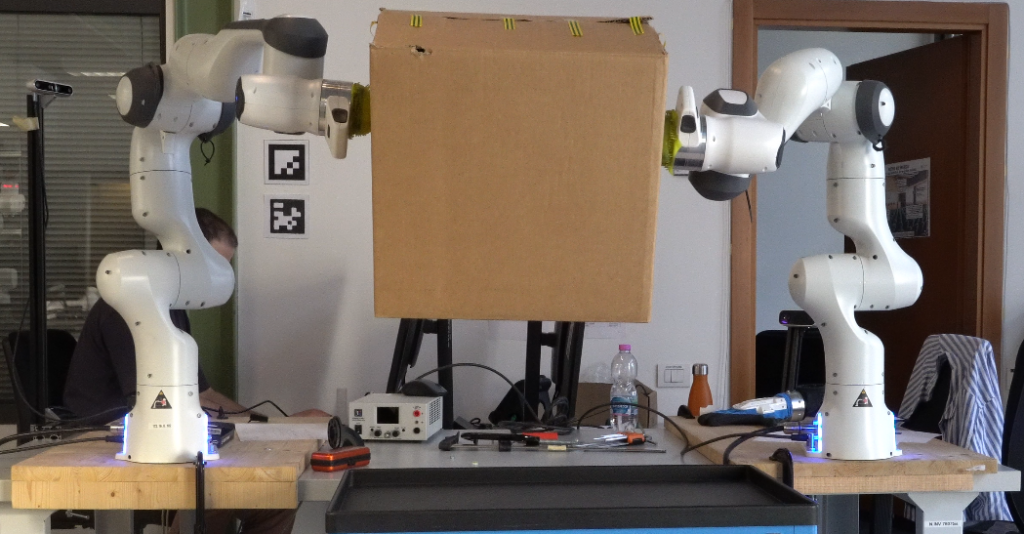
Dual arm robot picking of large objects is a common task in industrial settings, which is often accomplished besides a human operator, as a part of a more complex execution pipeline. This not only requires the simultaneous control of multiple arms to achieve the desired motion of the object and the maintenance of the right amount of force to ensure a stable grasp, but it has also to guarantee a safe and trustworthy human-robot interaction. One way to achieve the latter requirements is to ensure the execution of human-like robot motions, which can be easily understood and predicted by humans. In this paper, we present a technical framework that upon a passivity-based adaptive force impedance control for modular multi-manual object manipulation, integrating it with a vision-based system to increase the effectiveness and generalizability of the manipulative action, as well as with a human-like Cartesian motion planning algorithm, to enable dual arm picking of large objects. We tested our approach in experiments with real manipulators during different types of large objects picking.
@INPROCEEDINGS{10871061,
author={Baracca, Marco and Morello, Luca and Bianchi, Matteo},
booktitle={2025 IEEE/SICE International Symposium on System Integration (SII)},
title={A technical integration framework for human-like motion generation in symmetric dual arm picking of large objects},
year={2025},
volume={},
number={},
pages={984-989},
keywords={Robot motion;Service robots;Pipelines;Force;Human-robot interaction;System integration;Manipulators;Prediction algorithms;Planning;Maintenance},
doi={10.1109/SII59315.2025.10871061}}