
Luca Castri, Gloria Beraldo, Sariah Mghames, Marc Hanheide, and Nicola Bellotto
Accepted by the “Causal-HRI: Causal Learning for Human-Robot Interaction” workshop at the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI)
Abstract
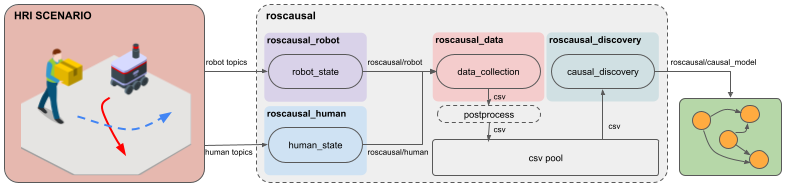
Deploying robots in human-shared spaces requires understanding interactions among nearby agents and objects. Modelling cause-and-effect relations through causal inference aids in predicting human behaviours and anticipating robot interventions. However, a critical challenge arises as existing causal discovery methods currently lack an implementation inside the ROS ecosystem, the standard de facto in robotics, hindering effective utilisation in robotics. To address this gap, this paper introduces ROS-Causal, a ROS-based framework for onboard data collection and causal discovery in human-robot spatial interactions. An ad-hoc simulator, integrated with ROS, illustrates the approach’s effectiveness, showcasing the robot onboard generation of causal models during data collection.
@misc{castri2024roscausal,
title={ROS-Causal: A ROS-based Causal Analysis Framework for Human-Robot Interaction Applications},
author={Luca Castri and Gloria Beraldo and Sariah Mghames and Marc Hanheide and Nicola Bellotto},
year={2024},
eprint={2402.16068},
archivePrefix={arXiv},
primaryClass={cs.RO}
}