
Alexander Berndt, Niels van Duijkeren, Luigi Palmieri, Alexander Kleiner and Tamás Keviczky
IEEE Transactions on Robotics
Abstract
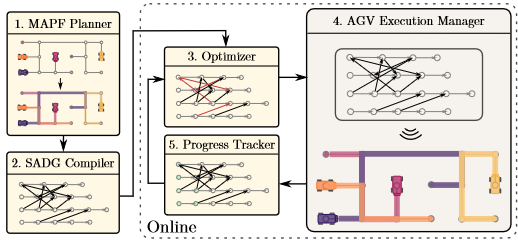
The trajectory planning for a fleet of automated guided vehicles (AGVs) on a roadmap is commonly referred to as the multi-agent path finding (MAPF) problem, the solution to which dictates each AGV’s spatial and temporal location until it reaches its goal without collision. When executing MAPF plans in dynamic workspaces, AGVs can be frequently delayed, e.g., due to encounters with humans or third-party vehicles. If the remainder of the AGVs keeps following their individual plans, synchrony of the fleet is lost and some AGVs may pass through roadmap intersections in a different order than originally planned. Although this could reduce the cumulative route completion time of the AGVs, generally, a change in the original ordering can cause conflicts, such as deadlocks. In practice, synchrony is therefore often enforced by using a MAPF execution policy employing, e.g., an action dependency graph (ADG) to maintain ordering. To safely re-order without introducing deadlocks, we present the concept of the switchable action dependency graph (SADG). Using the SADG, we formulate a comparatively low-dimensional mixed-integer linear program that repeatedly re-orders AGVs in a recursively feasible manner, thus maintaining deadlock-free guarantees, while dynamically minimizing the cumulative route completion time of all AGVs. Various simulations validate the efficiency of our approach when compared to the original ADG method as well as robust MAPF solution approaches.
@ARTICLE{10363684,
author={Berndt, Alexander and van Duijkeren, Niels and Palmieri, Luigi and Kleiner, Alexander and Keviczky, Tamás},
journal={IEEE Transactions on Robotics},
title={Receding Horizon Re-Ordering of Multi-Agent Execution Schedules},
year={2024},
volume={40},
number={},
pages={1356-1372},
keywords={Delays;System recovery;Robots;Switches;Robot kinematics;Planning;Trajectory;Mixed integer programming;multi-agent path finding (MAPF);robust plan execution;scheduling and coordination},
doi={10.1109/TRO.2023.3344051}}