
Michele Pierallini, Franco Angelini, and Manolo Garabini
IEEE Transactions on Systems, Man, and Cybernetics: Systems
Abstract
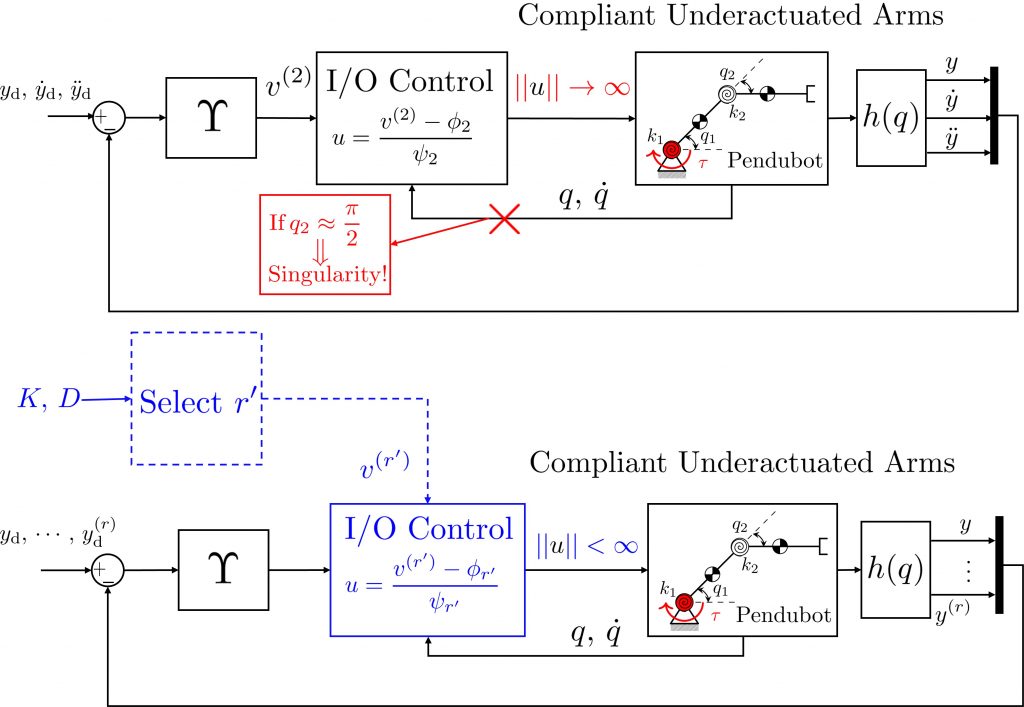
Soft robots are deformable, compliant, and underactuated systems. During any task, due to their enormous capability of body deformation, the relative degree may not be well-defined. Since the applicability of the large majority of the state-of-the-art control techniques depends on this property, they frequently encounter singularities. This fact can jeopardize the system’s safety, prevent the correct task execution, or reduce performance. In this work, we investigate the relative degree of dependence for a class of compliant underactuated arms. Our method leverages the well-known Strong Inertial Coupling hypothesis that, if holds, guarantees a constant relative degree of two. We generalize it by introducing coupling conditions where the relative degree is assured to be piecewise constant and greater than two. Relying on the design parameters, we analyze the dynamic evolution of the coupling conditions, which are then used to synthesize a classic input-output feedback controller. We also prove the stability of the closed-loop system. Finally, we validate the efficacy of the approach in simulation and on real hardware using a two and three degrees of freedom underactuated compliant arms with varying stiffness profiles, tasks, and disturbances.
@article{pierallini2024dynamic,
title={Dynamic Coupling for Underactuated Compliant Arms With Not Well-Defined Relative Degree},
author={Pierallini, Michele and Angelini, Franco and Garabini, Manolo},
journal={IEEE Transactions on Systems, Man, and Cybernetics: Systems},
year={2024},
publisher={IEEE}
}