
Tomasz Piotr Kucner, Martin Magnusson, Sariah Mghames, Luigi Palmieri, Francesco Verdoja, Chittaranjan Srinivas Swaminathan, Tomáš Krajník, Erik Schaffernicht, Nicola Bellotto, Marc Hanheide, and Achim J. Lilienthal
The International Journal of Robotics Research
Abstract
As robots and humans increasingly share the same workspace, the development of safe motion plans becomes paramount. For real-world applications, nonetheless, it is critical that safety solutions are achieved without compromising performance. The computation of safe, time-efficient trajectories, however, usually requires rather complex often decoupled planning and optimization methods which degrades the nominal performance. In this work, instead, we cast the problem as a graph search-based scheme that enables us to solve the problem efficiently. The graph search is guided by an informed cost balance criterion. In this context we present the S∗ algorithm which minimizes the total planning time by equilibrising shortest time-efficient paths and paths with higher safe velocities. The approach is compatible with standards and validated both in rigorous simulation trials on a 6 DoF UR5 robot as well as real world experiments on a Franka Emika 7 DoF research robot.
@article{doi:10.1177/02783649231190428,
author = {Tomasz Piotr Kucner and Martin Magnusson and Sariah Mghames and Luigi Palmieri and Francesco Verdoja and Chittaranjan Srinivas Swaminathan and Tomáš Krajník and Erik Schaffernicht and Nicola Bellotto and Marc Hanheide and Achim J Lilienthal},
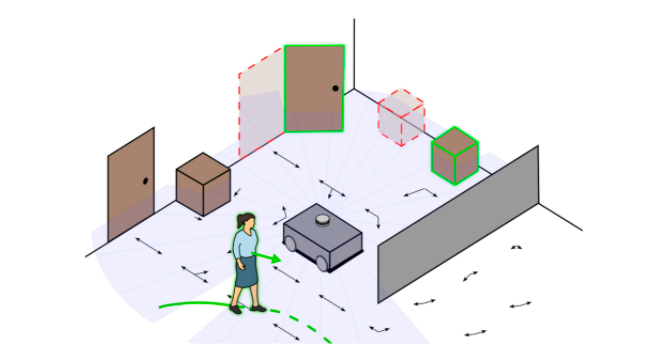
title ={Survey of maps of dynamics for mobile robots},
journal = {The International Journal of Robotics Research},
volume = {42},
number = {11},
pages = {977-1006},
year = {2023},
doi = {10.1177/02783649231190428},
URL = {
https://doi.org/10.1177/02783649231190428
}