
Paolo Bonifati, Giuseppe Averta, Paolo Salaris and Matteo Bianchi
2023 I-RIM Conference
Abstract
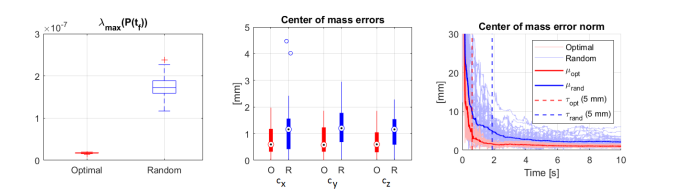
The problem of grasping objects with robotic hands has a long history in literature, yet many issues are still open, especially when dealing with the perception of the touched object, and its manipulation. These two problems are usually analyzed separately; however, since the sense of touch is intrinsically an active sense, i.e. motion and perception are two sides of the same coin, it could be useful to deal with these two aspects in an integrated fashion. Indeed, as we can borrow from the active sensing literature applied to vehicles locomotion, the motion itself could be valuable source of information on the system’s state. In this work, we propose a first step in this direction, targeting the development of a novel optimization framework for the estimation of the inertial parameters of a grasped rigid body. In a nutshell, the goal is to identify the optimal manipulation actions that a robot should exert on a generic object to maximize the accuracy and minimize the uncertainty for the estimation of unknown mechanical properties of the manipulated item, such as its center of mass and inertia tensor.
@misc{bonifati_2023_10722502,
author = {Bonifati, Paolo and
Averta, Giuseppe and
Salaris, Paolo and
Bianchi, Matteo},
title = {Optimal manipulation patterns can drive the
estimation of object mechanical properties
},
month = oct,
year = 2023,
publisher = {Zenodo},
doi = {10.5281/zenodo.10722502},
url = {https://doi.org/10.5281/zenodo.10722502},
}