
Dennis Ossadnik, Elisabeth Jensen, and Sami Haddadin
Proceedings 2021 IEEE International Conference on Robotics and Automation (ICRA)
Abstract
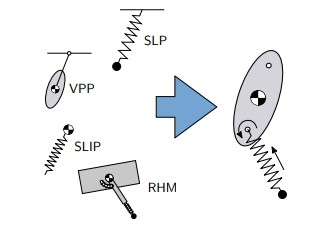
While many advancements have been made in the development of template models for describing upright-trunk locomotion, the majority of the effort has been focused on the stance phase. In this paper, we develop a new compact
dynamic model as a first step toward a fully unified locomotion template model (ULT-model) of an upright-trunk forward hopping system, which will also require a unified control law in the next step. We demonstrate that all locomotion subfunctions are enabled by adding just a point foot mass and a parallel leg actuator to the well-known trunk SLIP model and that a stable limit cycle can be achieved. This brings us closer toward the ultimate goal of enabling closed-loop dynamics for anchor matching and thus achieving simple, efficient, robust and stable
upright-trunk gait control, as observed in biological systems.
@inproceedings{ossadnik_2021_ult,
title={ULT-model: Towards a one-legged unified locomotion template model for forward hopping with an upright trunk},
author={Ossadnik, Dennis and Jensen, Elisabeth and Haddadin, Sami},
booktitle={2021 IEEE International Conference on Robotics and Automation (ICRA)},
note= "to appear",
year={2021},
organization={IEEE}
}