
Thomas Steinecker, and Alexander Kurdas, and Nico Mansfeld, and Mazin Hamad, and Robin Jeanne Kirschner, Saeed Abdolshah and Sami Haddadin
Mean Reflected Mass: A Physically Interpretable Metric for Safety Assessment and Posture Optimization in Human-Robot Interaction
Proceedings IEEE International Conference on Robotics and Automation (ICRA)
Abstract
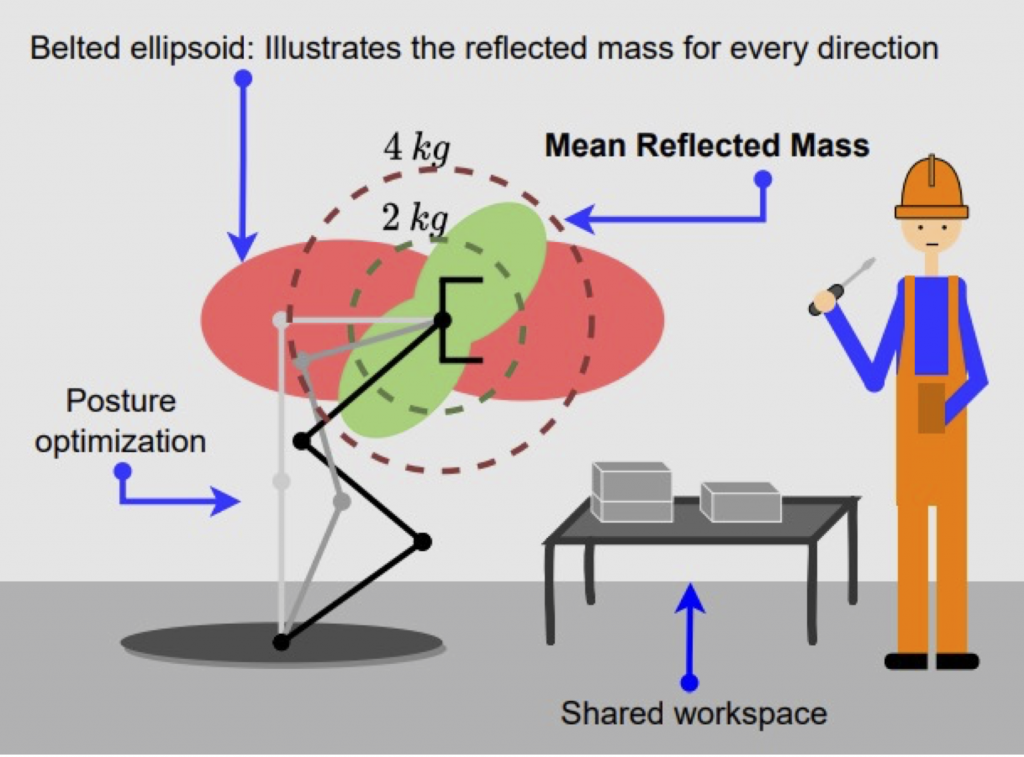
In physical human-robot interaction (pHRI), safety is a key requirement. As collisions between humans and robots can generally not be avoided, it must be ensured that the human is not harmed. The robot reflected mass, the contact geometry, and the relative velocity between human and robot are the parameters that have the most significant influence on human injury severity during a collision. The reflected mass depends on the robot configuration and can be optimized especially in kinematically redundant robots. In this paper, we propose the Mean Reflected Mass (MRM) metric. The MRM is independent of the direction of contact/motion and enables assessing and optimizing the robot posture w.r.t. safety. In contrast to existing metrics, it is physically interpretable, meaning that it can be related to biomechanical injury data for realistic and model-independent safety analysis. For the Franka Emika Panda, we demonstrate in simulation that an optimization of the robot’s MRM reduces the mean collision force. Finally, the relevance of the MRM for real pHRI applications is confirmed through a collision experiment.
@InProceedings{SteineckerICRA2022,
author = {Thomas Steinecker, and Alexander Kurdas, and Nico Mansfeld, and Mazin Hamad, and Robin Jeanne Kirschner, and Saeed Abdolshah and Sami Haddadin},
title = {Mean Reflected Mass: A Physically Interpretable Metric for Safety Assessment and Posture Optimization in Human-Robot Interaction},
journal = {IEEE International Conference on Robotics and Automation (ICRA)},
year = {Accepted, 2022},
}