
Tim Schreiter, Rishi Hazra, Jens Rüppel and Andrey Rudenko
2024 33rd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)
Abstract
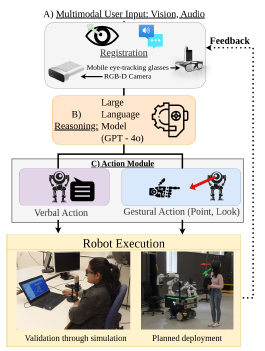
Integrating multimodal foundation models has significantly enhanced autonomous agents’ language comprehension, perception, and planning capabilities. However, while existing works adopt a \emph{task-centric} approach with minimal human interaction, applying these models to developing assistive \emph{user-centric} robots that can interact and cooperate with humans remains underexplored. This paper introduces “Bident”, a framework designed to integrate robots seamlessly into shared spaces with humans. Bident enhances the interactive experience by incorporating multimodal inputs like speech and user gaze dynamics. Furthermore, Bident supports verbal utterances and physical actions like gestures, making it versatile for bidirectional human-robot interactions. Potential applications include personalized education, where robots can adapt to individual learning styles and paces, and healthcare, where robots can offer personalized support, companionship, and everyday assistance in the home and workplace environments.
@misc{schreiter2024bidirectionalintentcommunicationrole,
title={Bidirectional Intent Communication: A Role for Large Foundation Models},
author={Tim Schreiter and Rishi Hazra and Jens Rüppel and Andrey Rudenko},
year={2024},
eprint={2408.10589},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2408.10589},
}