
Seyed Ali Baradaran Birjandi, Harshit Khurana, Aude Billard, and Sami Haddadin
Proceedings of 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Abstract
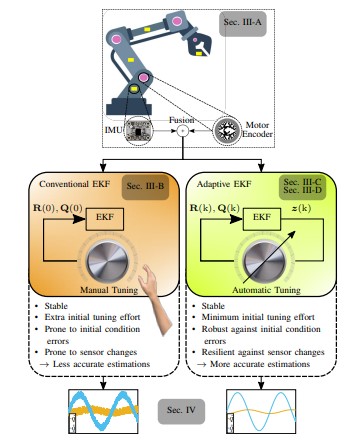
One can estimate the velocity and acceleration of robot manipulators by utilizing nonlinear observers. This involves combining inertial measurement units (IMUs) with the motor encoders of the robot through a model-based sensor fusion technique. This approach is lightweight, versatile (suitable for a wide range of trajectories and applications), and straightforward to implement. In order to further improve the estimation accuracy while running the system, we propose to adapt the noise information in this paper. This would automatically reduce the system vulnerability to imperfect modelings and sensor changes. Moreover, viable strategies to maintain the system stability are introduced. Finally, we thoroughly evaluate the overall framework with a seven DoF robot manipulator whose links are equipped with IMUs.
@unpublished{citekey,
author = "Birjandi, Seyed Ali Baradaran and Khurana, Harshit and Billard, Aude and Haddadin, Sami",
title = "A Stable Adaptive Extended Kalman Filter for Estimating Robot Manipulators Link Velocity and Acceleration",
note = "",
month = "December",
year = "2023"
}